

转子动平衡是旋转机械维护中的关键环节,其精度直接影响设备运行稳定性与使用寿命。作为专业技术人员,以下将从原理、操作流程及注意事项三个维度,系统阐述如何科学运用平衡机完成转子动平衡。
当转子质量分布不均匀时,旋转会产生离心力导致振动。动平衡机通过测量转子旋转时的振动信号,***计算出不平衡量的大小与相位角。根据ISO1940标准,平衡精度等级G值需根据转子类型确定,如电机转子通常要求G2.5级,精密主轴则需达到G0.4级。
现代平衡机采用微机测量系统,通过光电传感器捕捉基准相位,振动传感器采集位移/速度信号,经FFT变换分离出工频振动分量。最新型号设备已实现自动标定、矢量分解及配重计算一体化,测量精度可达0.1g·mm/kg。
1. 前期准备阶段
• 清洁转子表面油污,检查轴颈圆度误差≤0.005mm
• 根据转子重量选择合适支撑架,确保万向节联轴器对中偏差<0.02mm
• 输入转子参数:质量分布、工作转速(需高于临界转速20%)
2. 试重法平衡操作
(1) ***空转测量初始振动值,典型允许值:<50μm@3000rpm
(2) 在测试平面添加试重(建议取预估不平衡量的10-20%)
(3) 二次运行获取影响系数,系统自动生成配重方案
(4) 采用去重(钻孔)或配重(螺栓固定)方式修正
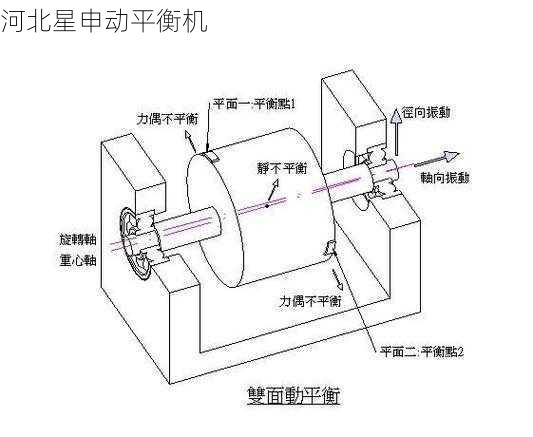
3. 双平面平衡要点
对于长径比>1/3的转子,必须采用双面动态平衡:
• 先平衡近驱动端平面,再校正自由端
• 使用影响系数法消除面间耦合效应
• 最终残余不平衡量应满足U=9549×G/n (g·mm)
1. 转速选择策略
• 刚性转子:可在额定转速的20-30%进行低速平衡
• 柔性转子:必须进行高速平衡(≥80%工作转速)
• 过临界转速时需快速通过,避免共振放大
2. 传感器安装规范
• 振动探头安装距轴承座1/3轴长位置
• 光电传感器与反光贴间距保持50±5mm
• 所有传感器电缆需做电磁屏蔽处理
3. 数据有效性验证
• 重复性测试:连续三次测量差值<15%
• 相位稳定性:±5°范围内波动
• 配重验证:添加试验配重后振动降幅>60%
案例1:电气干扰导致数据跳变
现象:相位角无规律变化
对策:检查接地电阻<4Ω,加装磁环滤波器
案例2:机械松动引发虚假信号
现象:振动值随转速非线性增长
对策:重新紧固地脚螺栓,检查联轴器磨损
案例3:转子热变形影响
现象:冷态平衡合格但热态振动超标
对策:采用红外温控平衡法,模拟工作温度状态
• 每日使用前用标准转子进行设备标定
• 每周清洁导轨并涂抹特种润滑脂(NLGI 2级)
• 每季度检查传感器灵敏度衰减情况
• 每年由厂家进行系统精度复检
通过规范化的操作流程与精细化的参数控制,平衡机可将转子振动控制在2.5mm/s以下,使设备达到***运行状态。实际应用中需结合转子动力学特性灵活调整工艺参数,必要时采用现场动平衡作为补充校正手段。


