

旋转部件的不平衡力矩测量是机械制造和维修中的关键环节,平衡机作为专业设备在此过程中发挥着重要作用。本文将详细探讨如何通过平衡机进行旋转部件不平衡力矩测量误差的校正,从原理到具体操作步骤进行全面分析。
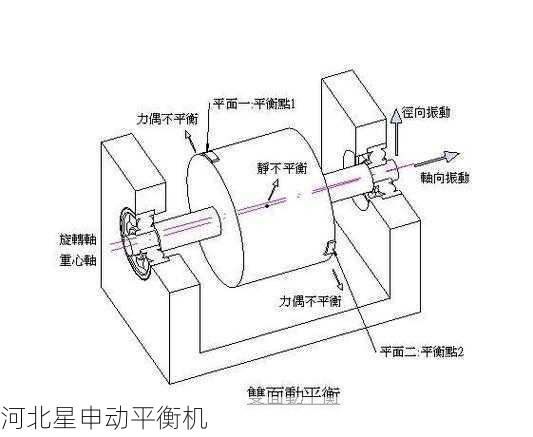
首先需要明确不平衡力矩的基本概念。当旋转部件的质量分布不均匀时,会产生离心力,这个离心力与旋转半径的乘积即为不平衡力矩。平衡机通过测量这个力矩来确定需要校正的位置和大小。在实际测量中,误差可能来源于多个方面,包括设备本身的精度、安装方式、环境因素以及操作手法等。
测量前的准备工作***关重要。必须确保平衡机安装在稳固的基础上,避免外界振动干扰。被测部件在平衡机上的安装需要特别注意:轴颈与支承的配合间隙应符合标准,联轴器的对中误差要控制在允许范围内。对于大型转子,还需考虑温度变化对测量结果的影响,建议在恒温环境下进行测量。
在测量过程中,常见的误差来源包括:1)传感器灵敏度不足或安装位置不当;2)转速不稳定导致数据采集不准确;3)机械传动系统存在间隙或摩擦;4)电子信号处理环节引入噪声。针对这些问题,可以采取以下校正措施:定期校准传感器灵敏度,优化传感器布置位置;使用高精度变频器控制转速;检查并消除机械传动链中的松动;采用数字滤波技术处理信号。
具体校正操作可分为以下几个步骤:首先进行初始不平衡量测量,记录各测点的振动幅值和相位;然后添加已知试重,观察系统响应变化;通过矢量运算计算出实际不平衡量与测量值之间的偏差;最后建立误差补偿模型,将补偿系数输入平衡机控制系统。这个过程可能需要反复进行2-3次,直到测量误差控制在允许范围内。
对于不同类型的平衡机,校正方法也有所区别。硬支承平衡机需要准确输入转子的几何参数和支承刚度,软支承平衡机则更依赖试重法进行校准。现代智能平衡机通常配备自动误差补偿功能,可以存储历史校正数据,建立针对特定类型转子的误差预测模型,显著提高后续测量的准确性。
环境因素对测量误差的影响不容忽视。温度变化会导致金属部件热胀冷缩,改变转子的动态特性;空气流动可能引起额外的振动干扰;电磁干扰会影响传感器信号的稳定性。因此,高精度平衡测量应在环境条件稳定的实验室内进行,必要时采取隔振、恒温、电磁屏蔽等措施。
操作人员的专业技能也是保证测量精度的关键因素。合格的平衡机操作人员应当:熟悉转子动力学基本原理;掌握设备操作规范;能够识别和排除常见故障;具备数据分析能力。建议定期对操作人员进行专业培训,建立标准化的操作流程。
随着技术进步,现代平衡机集成了更多智能校正功能。例如,基于人工智能的自学习系统可以自动识别误差模式并调整补偿参数;云平台支持可以实现远程诊断和参数优化;高精度图像处理技术可以辅助确定不平衡点的***位置。这些新技术大大提高了不平衡力矩测量的准确性和效率。

最后需要强调的是,平衡机本身的定期维护保养对保持测量精度***关重要。包括:定期检查机械部件的磨损情况;校准传感器和测量电路;更新控制软件;保持设备清洁。建议建立完善的设备维护档案,记录每次校准和维护的数据,为误差分析提供依据。
通过以上系统化的误差校正方法,可以显著提高旋转部件不平衡力矩测量的准确性,为后续的动平衡校正提供可靠依据。在实际应用中,应根据具体设备类型、转子特点和精度要求,选择合适的校正策略,并持续优化测量流程,才能获得***的不平衡校正效果。


